2014년 12월 발사된 일본의 소형 탐사선 ‘하야부사2’가 32억km를 여행한 끝에 지난 6월 소행성 ‘류구’ 상공에 도착했다. 류구는 지구에서 약 3억km 떨어져 있다. 하야부사2는 류구 주변을 돌다가 류구 표면에 소행성 탐사 로버 2대를 내려보내 무사히 착륙 시켰다. 인간이 만든 탐사선이 소행성 표면에 착륙한 것은 이번이 처음이다. 과학동아는 하야부사2 프로젝트 책임자인 츠다 유이치(津田 雄一) 일본우주항공연구개발기구(JAXA) 박사와 e메일 인터뷰를 진행했다. 츠다 박사의 설명을 토대로 기사를 재구성했다.
소행성 ‘류구’로 떠난 ‘하야부사2’
태양계에는 모두 70만 개 이상의 소행성이 있습니다. 태양 주위를 공전하지만 크기가 아주 작은 천체들로, 주로 화성과 목성 궤도 사이의 ‘소행성대’에서 발견되죠. 소행성은 색과 반사도, 스펙트럼에 따라 C형, S형, M형으로 구분됩니다. 그 중 약 75%의 소행성이 C형입니다. C형 소행성은 반사도가 낮아 매우 어둡게 보인다는 특징이 있습니다.
C형 소행성은 과학자들에게 특히 매력적인 연구 대상입니다. C형 소행성이 다른 유형의 소행성보다 태양계 탄생 초기의 원시물질을 많이 보유하고 있을 가능성이 높고, 생명체의 생존에 필수적인 유기물과 물로 이뤄져 있을 것으로 추정되기 때문입니다.
소행성에서 이 물질들을 발견할 수 있다면, 생명체의 기원뿐만 아니라 태양계의 진화 과정도 알 수 있습니다. 그래서 우리는 소행성을 탐사해 샘플을 직접 가지고 지구로 돌아와 연구를 하기로 했습니다.
그런데 C형 소행성은 화성과 목성 사이 소행성대 중간부 너머에 주로 분포해 있습니다. 현재 인간의 기술로 소행성대와 지구를 왕복하는 탐사는 불가능합니다. 하지만 운이 좋게도 우리는 화성 궤도의 안쪽을 돌고 있는, ‘류구’라는 C형 소행성을 찾을 수 있었습니다.
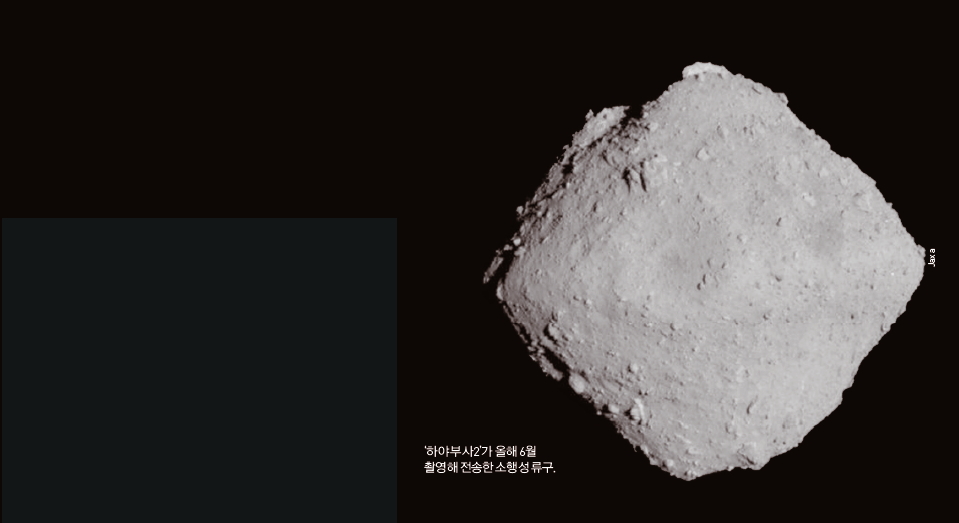
1999년 처음 발견된 류구의 정식 명칭은 ‘162173 류구’입니다. 류구라는 이름은 일본어로 ‘용궁’이라는 뜻입니다. 처음에는 구형일 것이라고 생각했는데, 이번에 하야부사2의 탐사로 모서리가 뭉툭한 다이아몬드처럼 생겼다는 사실을 알게 됐습니다.
류구의 지름은 약 900m이며, 공전 주기는 474일, 자전 주기는 7시간 30분입니다. 지구에서는 약 3억 km 떨어진 곳에 있습니다. 이 정도 거리는 현재 우주 탐사 기술로 충분히 접근할 수 있습니다.
발사 3년 6개월 만에 류구 도착
하야부사2는 2014년 12월 3일 일본 가고시마현 다네가시마 우주센터에서 발사됐습니다. 3년 반의 기나긴 여정 끝에 2018년 6월 류구에 접근했죠. 류구와 지구 사이의 거리를 고려하면 지구에서 탐사선을 정확하게 착륙시키는 건 상상 이상으로 어려운 일입니다. 이는 마치 일본에서 브라질에 있는 6cm의 표적을 겨냥하는 것과 같습니다.
그래서 우리는 류구의 위치를 정확하게 파악하기 위해 하야부사2에 특별한 항법 기술을 적용했습니다. 전파를 이용해 거리를 측정하는 전파측정법뿐만 아니라 이미지 기반의 광학 항법을 함께 사용한 것입니다.
하야부사2에는 내장 카메라와 ‘라이다(LIDAR)’라는 레이저 고도계가 탑재돼 있습니다. 우리는 이를 이용해 다양한 각도에서 류구를 촬영했습니다. 이렇게 촬영한 사진에는 류구 외에 주위의 별까지 함께 찍혀 있습니다.
바로 이 배경 속 별의 위치를 토대로 류구와 하야부사2의 위치와 속도를 계산했고, 류구에 도착하기 위한 최적의 궤도를 알아낼 수 있었습니다. 덕분에 하야부사2는 발사 후 정확히 1302일 뒤인 2018년 6월 27일, 목표했던 류구 고도 20km 지점에 무사히 도착할 수 있었습니다.
‘호핑’ 기법으로 소행성 돌아다녀

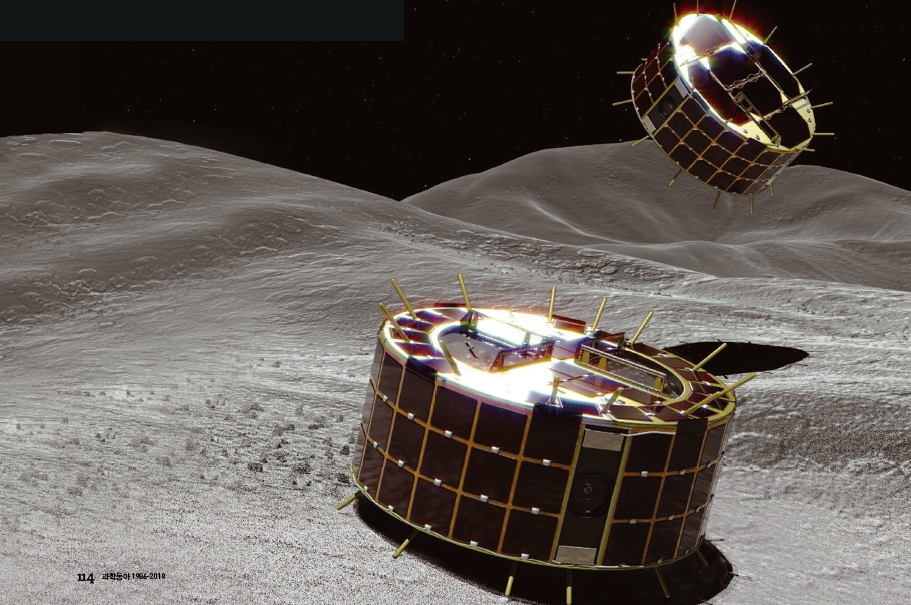
이후 하야부사2는 수십~수백m 상공에서 공전하며 류구를 관측하고 많은 자료를 보내줬습니다. 그리고 지난 9월 21일, 세계 최초로 ‘미네르바(MINERVA)-Ⅱ1’이라는 소형 탐사 로버를 소행성 표면에 착륙시키는 데 성공했죠. 지금까지 소행성을 스쳐 지나가거나 표면에 잠시 접촉해 시료를 채취한 적은 있었지만, 소행성 표면에 인간이 만든 물체가 직접 닿은 것은 미네르바가 처음입니다.
미네르바는 로버-1A와 로버-1B의 2대로 구성돼 있습니다. 육각형 통 모양에 지름 18cm, 높이 7cm, 무게 1.1kg의 작은 로봇입니다. 카메라로 류구 표면의 이미지를 촬영하고, 가시처럼 튀어나온 온도 센서로 온도를 측정합니다. 이밖에도 광센서, 가속도계, 자이로스코프 등이 탑재돼 있습니다.
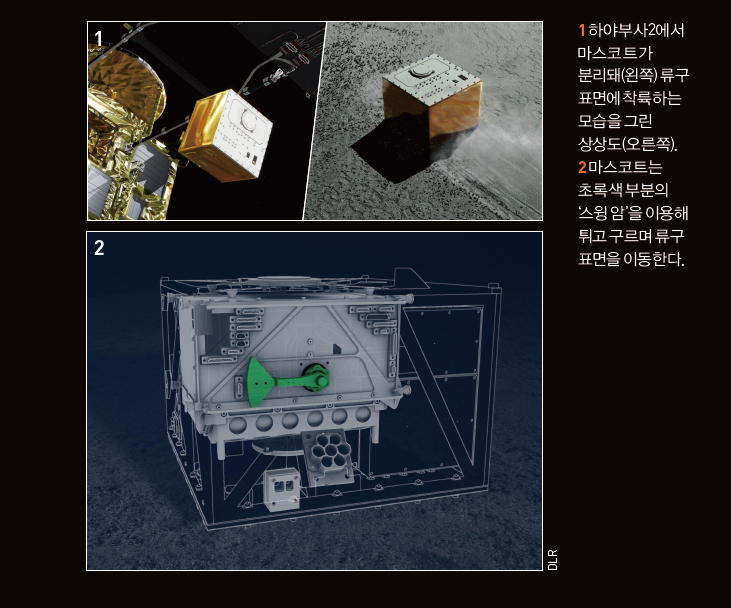
10월 2일에는 독일항공우주센터(DLR)와 프랑스국립우주연구센터(CNES)가 공동으로 개발한 ‘마스코트(MASCOT)’가 하야부사2에 실려 있다가 류구 표면에 성공적으로 착륙했습니다.
하야부사2는 류구 상공 약 51m 지점에서 마스코트를 자유낙하 시켰고, 마스코트는 6분 뒤 안전하게 땅에 도달했죠. 박스 모양의 마스코트는 미네르바보다 10배 무겁고, 광각 영상카메라, 적외선 현미경, 자기장측정기, 전파측정기 등이 탑재돼 있어 류구를 더 자세히 연구할 수 있습니다.
다만 마스코트는 전력 생산 장치 없이 배터리로만 작동해, 16시간이 지나면 임무가 중지되도록 만들어졌습니다. 마스코트는 류구에서 태양이 3번 지고 뜨는 17시간 동안 예상 임무 시간을 초과해 작동하면서 류구를 탐사했습니다. 현재 과학자들은 마스코트가 보내온 데이터를 분석하고 있습니다.
미네르바와 마스코트의 탐사에서 가장 주목할 점은 이들이 소행성 위를 움직이는 방법입니다. 두 로버는 마치 메뚜기처럼 한 곳에서 튀어 올랐다가 다른 곳으로 착지하는 ‘호핑(hopping)’ 방식으로 움직입니다. 바퀴로 이동하며 주변을 탐사하는 화성 탐사 로버와는 전혀 다른 형태죠.
류구의 중력은 지구의 8만 분의 1에 불과합니다. 이런 곳에서 바퀴를 이용해 소행성 표면을 돌아다니려고 한다면, 움직이기 시작한 순간 로버가 표면 위로 둥둥 떠올라 우리가 원하는 대로 움직이게 만들 수 없을 겁니다. 그래서 우리는 바퀴 역할을 하는 장치를 두 로버의 내부에 설치했습니다.
미네르바의 경우 로버 내부에 모터를 달았습니다. 모터가 회전하면 반동으로 기체가 튀어 오르는 거죠. 한번 호핑하는 데 최대 15분 정도 소요되고, 최대 15m까지 이동할 수 있습니다. 마스코트에도 마찬가지 역할을 하는 ‘스윙 암’이 달려 있습니다. 그래서 착륙 시에도 필요한 자세를 잡도록 제어할 수 있었습니다. 호핑 방법은 하야부사2에서 최초로 시도된 기술적 혁신입니다.
2kg 구리 포탄 충돌시켜 직접 샘플 채취
하야부사2의 임무는 아직 끝나지 않았습니다. 2019년 초에 탐사선을 착륙시켜 류구 샘플을 채취하는 중요한 임무가 남아있습니다. 우리는 2kg의 구리 포탄을 소행성 표면에 충돌시켜 인공 분화구를 만들 예정입니다. 상황이 허락한다면, 소행성 지표면 아래의 물질을 채취하기 위해 인공 분화구에 하야부사2를 착륙시킬 생각도 갖고 있습니다.
또 다른 탐사 로버인 ‘미네르바-Ⅱ2’도 2019년 말에 배치될 예정입니다. 남은 임무가 계획대로 진행된다면, 하야부사2는 적어도 1g의 류구 샘플을 가지고 2019년 11월 12일 류구를 떠난 뒤 2020년 말 지구로 귀환하게 될 것입니다.