인간을 비롯한 영장류는 팔을 가지고 있습니다. 다른 동물들은 팔 대신 네 개의 다리를 가지고 있거나 지느러미, 또는 날개를 갖고 있기도 합니다. 동물은 자신이 살고 있는 환경에 가장 잘 적응하기 위해 다양한 모양의 팔을 가지고 있습니다.
대부분의 육상동물에게는 팔 대신 다리가 네 개인 경우가 많습니다. 다리가 네 개면 험한 지형에서 균형을 잘 잡을 수 있고, 뛰는 속도도 빨라 살아남기 유리하기 때문이지요. 대부분의 네 다리 동물이 인간보다 운동 능력이 뛰어납니다. 그런데, 네 다리 대신 두 팔과 두 다리를 가진 인간이 어떻게 육지에서 가장 우월한 동물이 될 수 있었을까요.
인간이 팔과 손을 이용해서 다른 물건을 잡을 수 있었기 때문입니다. 각 상황에 맞는 물건을 손으로 골라잡아 팔로 이용했기 때문에 다양한 상황에서 가장 경쟁력이 높은 존재가 될 수 있었습니다. 도구를 사용했기 때문에 ‘도구의 인간’ ‘만드는 인간’이라는 뜻으로 ‘호모 파베르(Homo faber)’라고 부르기도 합니다.
인간은 팔과 손을 이용해서 다양한 도구를 만들어 내고 또 그 도구를 사용해서 인간의 능력을 향상시켰습니다. 우리는 자동차로 치타보다 빨리 달릴 수 있고, 잠수함으로 바닷속을 탐험할 수 있을 뿐 아니라 화성에 로봇을 보내서 화성의 상황을 스크린으로 확인하는 존재가 됐습니다. 두 다리 대신 두 팔을 선택(?)한 것은 정말 ‘신의 한 수’가 아니었을까 싶습니다.

물건 나르려면 4족, 일 잘하려면 2족
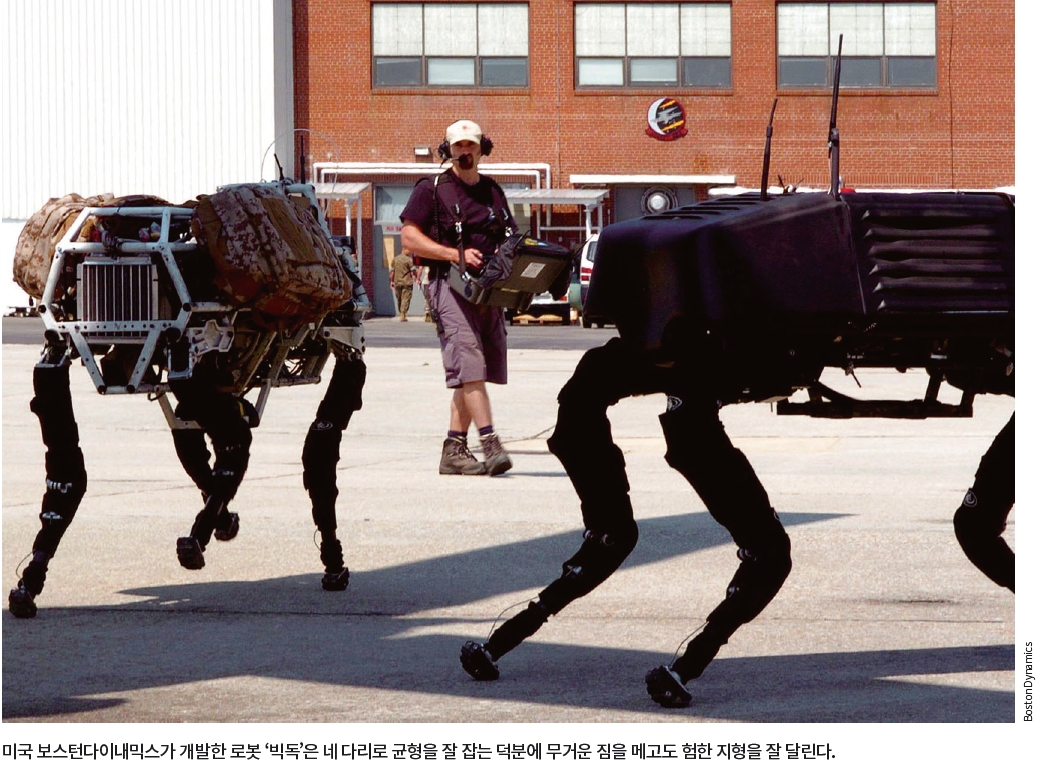
팔이 달린 덕분에 인간이 다양한 환경에 잘 적응할 수 있었다면, 로봇의 경우는 어떨까요. 로봇의 목적이 험한 지형에서 물건을 나르는 일뿐이라면 로봇이 균형을 잘 잡을 수 있도록 개, 소, 말처럼 네 다리로 기어 다니게 만드는 것이 가장 효율적입니다. 소처럼 생긴 군용 로봇이 많이 개발되는 이유입니다. 인간 병사 대신 로봇이 군장을 메고 험한 지형을 달려가야 하니까요. 미국 보스턴다이내믹스의 ‘빅독(BigDog)’이 가장 대표적인 4족 로봇입니다.
그런데 만약 로봇의 쓰임새가 짐 운반 하나가 아니라 사람처럼 다양한 일을 해야 한다면 어떻게 설계해야 할까요. 아마도 사람처럼 팔을 가지는 것이 가장 좋은 선택이 아닐까 싶습니다.
사실 예전부터 공장에 설치된 산업용 로봇은 대부분 팔만 존재하는 경우가 많았습니다. 아직도 로봇이라고 하면 로봇팔을 생각하는 독자도 많을 겁니다. 그만큼 로봇의 핵심은 팔에 있다고 해도 과언이 아닙니다. 바꿔 말하면 로봇팔을 잘 만들어야 로봇이 일을 잘 한다는 얘기가 됩니다. 그럼 이제 본격적으로 ‘일 잘하는’ 로보트 재권V를 만들기 위해서 좋은 팔을 만들어 보겠습니다.
로보트 재권V는 자유도 6으로 설계
팔을 만들 때 가장 먼저 고민해야 할 점은 ‘자유도를 몇 개로 할 것인가’ 하는 것입니다. 자유도는 움직이는 방향의 수, 즉 하드웨어로 보면 구동기(주로 전기모터가 사용됩니다)의 개수를 말합니다.
공간은 6개의 방향(X, Y, Z 3개의 수직방향과 α, β, γ 3개의 회전방향)으로 이뤄져 있습니다. 3차원 공간에서 모든 곳에 닿을 수 있는 최소의 숫자가 6이거든요. 6개의 방향에 대응하기 위해서는 최소한 6개의 자유도가 있어야 합니다. 3개의 미지수를 가진 방정식을 풀기 위해서는 최소 3개의 방정식이 필요하다는 것과 같은 원리입니다.
만약 6보다 적은 자유도를 가진 로봇팔이라면 분명 닿을 수 없는 공간이 존재합니다. 자유도가 높아지면 로봇이 움직이기가 훨씬 수월해집니다. 목표한 곳에 닿는 방법이 많아지기 때문이지요.
인간의 팔은 대략 자유도 7에 해당한다고 합니다. 자유도 6보다 자유도가 1이 더 높기 때문에 우리는 물건을 잡을 때 팔을 꼭 한 방향으로만 접근해서 잡을 수 있는 것이 아니라 여러 방향으로 접근해서도 잡을 수 있습니다. 심지어는 문고리 같은 고정된 물건을 잡고 팔꿈치나 어깨를 마구 돌릴 수도 있지요.
로보트 재권V는 자유롭게 움직이면서도 가볍게 만들기 위해 자유도 6으로 설계하겠습니다. 자유도가 하나 더 커지려면 구동기를 하나 더 달아야 하고, 그만큼 무거워지거든요.
모터? 어깨에 3개, 팔꿈치에 1개, 손목에 2개
로봇팔이 손으로 들 수 있는 무게를 ‘가반중량’이라고 합니다. 그래서 로봇팔의 능력(스펙)을 말할 때 가반중량을 묻습니다. 가반중량이 크면 그만큼 힘이 좋은 팔이지요.
로보트 재권V의 가반중량은 얼마로 하면 좋을까요. ‘로보트 재권V야, 냉장고에서 음료수 좀 가져와!’라고 명령하려면 최소한 음료수 캔 하나라도 들 수 있어야겠지요. 요즘 편의점에서 500mL 맥주 4캔에 1만 원 상품이 많이 나오니, 500mL 맥주 한 캔의 무게인 500g은 충분히 들 수 있도록 가반중량을 500g에서 20% 더 많은 600g으로 정해 볼까요.
자동차 스펙을 말할 때 ‘이 자동차 엔진은 배기량 2000cc, 최고출력 300마력, 최대토크 40kg·m’처럼 표현합니다. 토크(Torque)는 자동차 엔진처럼 회전하는 기계의 성능을 평가할 때 쓰는 말로, 회전하는 힘을 나타냅니다.
토크를 계산하기 위해서는 로봇팔이 물건을 들고 있는 경우를 상상하면 쉽습니다. 로봇팔의 길이와 물건의 무게를 곱한 값이 토크입니다. 만약 로봇팔의 길이가 1m이고, 무게 1kg인 물건을 들고 있다면 로봇팔이 버텨야 하는 토크는 1kg×1m=1kg·m가 됩니다. 만약 로봇 팔의 길이가 0.5m(50cm)로 줄어든다면 토크는 1kg×0.5m=0.5kg·m로 절반이 되겠지요.
로보트 재권V는 초등학생 크기 정도의 로봇으로 설정한 만큼 팔은 0.6m(60cm) 정도면 적당할 것 같습니다. 그리고 600g의 물건을 들어야 하니 0.6kg×0.6m=0.36kg·m의 토크를 낼 수 있어야 합니다.
0.36kg·m를 표준 토크 단위(Nm)로 환산하면 대략 3.5Nm입니다. 이 정도의 토크를 낼 수 있는 모터를 어깨에 넣겠습니다. 어깨에 모터를 3개 넣어야 사람 어깨처럼 세 방향으로 움직일 수 있을 테니 3.5Nm급 모터 3개를 어깨에 넣고 설계를 하겠습니다.
그리고 팔꿈치부터 손까지 거리는 팔의 절반 길이인 30cm로 잡아서 0.6kg×0.3m=0.18kg·m=1.8Nm급의 모터를 팔꿈치에 하나 넣으면 될 것 같습니다. 마지막으로 손목에는 0.6kg×0.1m=0.06kg·m=0.6Nm급의 모터 2개를 넣겠습니다.
정리해 보면, 어깨에 들어갈 3.5Nm급 모터 3개, 팔꿈치에 들어갈 1.8Nm급 모터 1개, 손목에 들어갈 0.6Nm급 모터 2개입니다. 그런데, 하나 더 생각할 것이 생겼습니다. 모터가 들어가면서 로봇팔이 들어야 할 무게가 더 생긴 것입니다.
어깨 모터는 팔꿈치 모터와 손목 모터 무게까지 모두 들어야 하고, 팔꿈치 모터는 손목 모터 무게까지 모두 들어야 하는 상황이 벌어졌습니다. 그래서 어깨 모터와 팔꿈치 모터의 토크를 모터의 무게를 감안해서 좀 더 높여야 할 것 같습니다. 얼마나 무거운 모터가 들어가느냐에 따라 늘려야 할 토크의 양도 달라지겠지요.
이런 식으로 다시 계산하는 과정을 여러 번 거치면 비로소 로봇팔에 쓰일 모터의 스펙을 최종적으로 결정할 수 있습니다. 제가 좋아하는 모터를 써서 계산해보니 어깨는 대략 6.0Nm, 팔꿈치는 4.0Nm, 손목은 1.2Nm의 토크를 낼 수 있는 모터가 필요하네요. 독자 여러분도 자신이 선호하는 모터가 있다면 이런 식으로 계산해 보기 바랍니다.
이제 팔에 들어갈 모터의 스펙도 산정했으니, 다음 호에서는 다리를 만들어 보도록 하겠습니다.
To be Continued.
한양대 로봇공학과 교수다. 휴머노이드 로봇 개발을 비롯해서 인간과 로봇간의 상호작용 연구를
활발하게 수행하고 있다. jkhan@hanyang.ac.kr