사람을 대신해 말긴 일을 척척해내는 로봇의 등장은 생각만해도 신나는 일이다. 하지만 현재 사용되는 산업용 로봇은 정해진 일을 순서대로 처리하는 '조금 똑똑한 기계' 일 뿐, 우리가 기대하는, 그런 모습은 아니다. 그래서 등장한 것이 휴먼로봇. 휴먼로봇은 어떤 환경에서도 적응이 가능한 전천후 로봇이다.
체코의 희곡작가 카렐 차펙이 쓴 희곡 '로섬의 유니버설 로봇'에서 처음 등장한 '로봇'이란 단어는 원래 '강제 노역' 혹은 '힘든 일'을 뜻하는 체코어 로보타(robota)에서 파생된 것이다. 어원에서부터 알 수 있듯 로봇의 등장은 인간의 힘을 덜어주는 도구로서 기대된 것이다.
고도 경제 성장기에 처음 등장한 산업용 로봇은 공장에서의 만성적인 인력 부족을 해결하기 위해 간단한 조작을 할 기계장치로 도입됐다. 그후 센서 기술과 마이크로프로세서 기술의 발달은 비제조업의 일부 분야에서도 로봇이 활용될 수 있는 길을 열었다.
로봇 기술의 발달에 따라 로봇이 적용되는 분야는 점점 확대되고 있다. 초창기 제조업 분야에서 인간의 단순 작업을 대신하는 로봇은 이제 국민 복지 차원에서의 적용까지 고려되고 있는 형편이다.
우리나라가 선진국 진입과 함께 인구의 고령화가 이루어지고, 대부분의 사람이 화이트 칼라 작업을 지향함에 따라 로봇은 이런 문제를 해결할 대안으로 제시된다. 즉 극한 상황 및 인력이 투입되기 곤란한 이른바 '3D 산업'에 더 이상 사람이 매달리기 보다는 로봇을 활용하는 것이 더 효과적이라는 의견이 공감대를 얻고 있는 것이다.
"힘든 일은 내게 맡겨라"

이런 관점에서 사회적으로 실현이 요구되는 로봇은 크게 세분야로 나누어 볼 수 있다. 첫째 인체 기능의 장애 보완을 통해 복지사회를 실현하는 로봇이다. 여기에는 고령자나 신체장애자를 간호하는 로봇, 의료와 재활에 활용할 로봇, 수술로봇 등이 포함된다.
둘째, 중노동을 요구하는 작업에 투입할 로봇이다. 열악한 환경이나 단순반복작업에서 인간을 해방시켜 궁극적으로 인간성 부활을 위한 인간대체 로봇이 이 범주에 속한다. 광업이나 농업, 화재진압, 심해나 고압 등에서의 작업은 당연히 이들 로봇의 몫이다. 그리고 셋째는 획기적인 국민 의료복지를 향상시킬 인체탐사 로봇, 인체수술 마이크로 로봇 등 마이크로 로봇이다.
일반적으로 산업용 로봇은 보통의 기계와 비교해 적용 공정이 범용성을 띠고 또 소프트웨어적인 프로그램의 변경이 가능하다. 그러나 인간과 비교하면 로봇의 기능은 매우 낮기만 하다. 우선 기구적인 측면에서 보자면 인간의 팔 기능을 최소화한 형태인 로봇의 행동 유연성은 극히 제한적이다. 산업용 로봇의 손은 유연성을 지닌 인간의 손과 달리 특정 공정에만 맞도록 고정 제작돼 있기 때문이다.
또한 인간처럼 이동이 자유롭지 못하고 지면에 고정돼 있다. 게다가 예측 불가능한 환경에 적응한다는 것은 상상도 할 수 없는 일이며, 설사 프로그래밍 돼 있는 환경이라도 변화에 자율적으로 대처할 수 있는 지능이 미비하다. 로봇이 진정 인간을 대신해 인간을 위해 일하기 위해서는 위에서 열거한 한계점이 없어야한다. 그래서 등장한 것이 산업용 로봇과 달리 기능하는 '휴먼 로봇'이다. 휴먼 로봇이란 '인간의 지능과 감각을 지닌 자율형 이동 로봇'이라 정의된다.
단적으로 표현해 휴먼 로봇이 전체 인간 형태를 모델로 한다면 산업 로봇은 휴먼 로봇의 팔 하나를 의미한다고 할 수 있다. 고정된 장소에서 규정된 작업만을 담당하는 산업용 로봇과 달리 인간처럼 자유롭게 장소를 이동하면서 다양한 일을 수행하기 위해서는 휴먼 로봇이 필수적이며, 또 다양한 분야에서 이러한 휴먼로봇들이 요구되고 있다.
기술적 측면에서 로봇은 대개 4세대로 구분된다. 제1세대는 일부 제조업의 반복 작업에 응용됐던 것으로, 감각 인식 기능이 없고 궤도에 의해 이동이 가능하며 일방향 커뮤니케이션을 특징으로 한다. 제2세대는 본격적으로 제조업에 활용된 로봇으로, 적응 순응 로봇이라 불린다. 이 로봇은 궤도가 없어도 이동이 가능하며 정리된 환경을 인식하는 능력을 가졌다.
한편 제3세대 로봇은 관리 제어형 자율 로봇이다. 이 로봇은 한정된 자연환경을 인식하면서 3차원 이동과 쌍방향 커뮤니케이션이 가능하다. 그리고 제4세대 로봇은 자율성의 향상과 학습기능을 가지고 있다.
휴먼 로봇의 개발 필요성을 인식한 세계 각국은 이미 이 분야에 대한 대규모의 투자와 함께 집중적인 연구에 들어갔다. 로봇 연구에 관한 한 일본은 세계를 선도하고 있다. 일본은 통산성 주관으로 1983년부터 1990년까지 극한 작업 로봇 연구 개발을 수행한 바 있으며 일본 기계기술연구소, 전자기술 총합연구소를 중심으로 미쓰비시 등 18개의 민간기업이 참여해 6천억 원을 쏟아 붓기도 했다.
이 프로그램의 구체적인 개발목표는 원자력 로봇을 비롯해 해양로봇 방재로봇이었지만 당시 수행된 고신뢰성 기술, 내방사선 기술, 이동 기술, 매니퓰레이션 기술, 원격조작 기술, 해중(海中) 시각 기술, 방재대체 기술 등 휴먼로봇의 다양한 요소 기술이 개발되면서 일본의 전반적 로봇기술과 선진 외국 경쟁국과의 기술 격차는 더욱 커졌다.
또한 일본이 극한 작업 로봇의 후속 연구프로그램으로 1991년부터 10년 동안 진행하는 마이크로 머신 연구개발은 다양한 분야의 고난이도 복합 기술로서 매년 그 결과가 발표되고 있는 중이다. 여기에는 설계 재료 가공 등의 기초기술에서부터 우주항공분야에 사용될 초소형 비행로봇 등을 망라한다.
미국도 이 분야에 대해 적지 않은 관심을 가지고 있다. 지난 1985년부터 수행되고 있는 국가적 장기 대형 프로그램으로 나사(NASA) 및 미국국방고등연구소(DARPA)가 주도하는 로봇 개발 프로그램에서는 우주 정거장 건설 계획의 하나로, 우주에서 걷고 비행이 가능한 무인 자율 착륙차량 등에 관한 연구가 진행중이다.
한편 유럽에서는 유럽 공동체의 전략프로그램으로 ESPRIT EUREKA 등이 진행중이다. 1984년과 85년에 시작된 이 프로그램에는 휴먼 로봇 개발이 포함돼 있는데, 여기에는 우주탐사로봇, 경비용 자율주행 로봇, 대형로봇, 차세대 로봇 제어기술 개발등이 구체적인 과제로 설정돼 있다.
독일과 러시아가 각각 진행한 방재용 로봇 제조 계획은 원자핵 관련 장소에서의 공정과 방재작업용으로 사용하기 위한 것이었다. 독일의 핵 연구센터, 러시아의 방재본부가 독자적으로 진행한 이들 계획은 무한궤도형 이동장치에 두개의 매니퓰레이터가 장착돼 필요한 공정을 모듈식 교환으로 수행하도록 고안됐다.
우리나라는 위에서 말한 로봇의 세대구분 중 1,2세대 로봇에 대한 연구는 활발한 편이지만 2000년대에 필요한 휴먼로봇, 즉 3,4세대 로봇에 대한 연구는 대단히 미약한 실정이다.
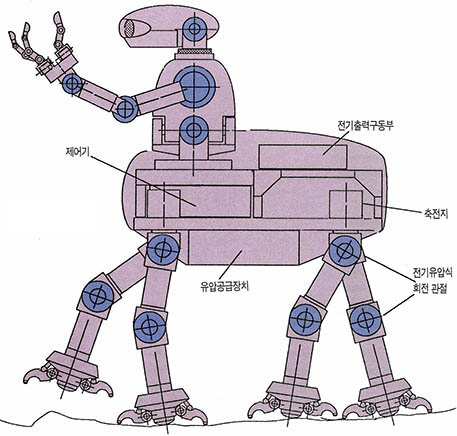
사정이 이런 가운데 올해부터 2단계 10년 계획으로 4각보행 및 2각보행 기능을 갖는 휴먼로봇 시스템의 개발을 한국과학기술연구원에서 진행중이다. 두팔과 두손, 그리고 인간의 오감을 대신하는 여러 센서 기능을 가진 이 로봇이 개발되면 극한작업과 각종 서비스 분야에 활용할 예정이다.