대전EXPO에서는 꿈돌이 안내 로봇과 기념촬영도 하고 로봇이 새겨준 얼굴조각도 받고 사물놀이로봇이 연주하는 우리의 전통가락도 감상할 수 있다.
많은 사람들에게 첨단과학을 상징하는 물체를 하나 예로 들라면 아마 십중팔구는 로봇이라고 말할 것이다. 로봇의 개념이 처음 등장한 것은 1910년 체코의 극작가 칼 차펙의 희곡에서다. 이 작품에서 인간에게 무조건 복종하고 모든 육체적 노동을 대신할 로보타(robota, 노예 노동자라는 뜻)가 등장 했으나 이 로봇은 주인에게 반기를 들고 모든 인간을 죽이는 흉악한 기계로 돌변한다.
인간의 명령을 충실하게 수행하는 현대적 의미의 로봇개념이 정립된 것은 최근 세상을 떠난 세계적인 과학저술가 아이작 아시모프가 SF(과학소설)로 로봇시리즈를 내놓으면서다. 그후 과학기술의 발전에 따라 인간의 일을 대신해주고 인간의 모습을 한 로봇이 실생활에 등장하기에 이른 것이다. 과학기술전문박람회인 대전EXPO에서도 로봇은 여러가지 형태와 기능을 갖고 여기저기서 관람객들을 맞을 것이다.
이미 활약 시작한 꿈돌이로봇
올봄 대전EXPO장 기공식 때에는 우주아기요정 꿈돌이가 UFO(미확인 비행물체)를 타고 나타났다. 우주비행선 안에 들어있던 꿈돌이로봇은 서서히 비행선 밖으로 나타나면서 "저는 대전박람회 마스코트 꿈돌입니다. 기공식에 오신 걸 환영합니다"라는 인사말을 했다. 그후 대회의 성공적 개최를 다짐하는 마당밟기에서는 머리와 몸통을 전후 좌우로 움직이면서 음악에 맞춰 율동을 보여주었다.
기공식 때 선보인 꿈돌이로봇은 한국기계연구소 국금환박사팀과 로봇제작업체인 한국미연에서 제작한 일종의 박람회 홍보 로봇. 꿈돌이가 타고 있는 우주비행선은 3륜구동식이고 꿈돌이로봇은 32비트 마이크로프로세서를 장착한 원격조종 로봇이다. 기술적으로 하이테크를 요구하는 제품은 아니므로 제작하는데 큰 어려움은 없었다고 한다.
꿈돌이로봇은 박람회가 개최되기 전까지는 서울과 대전 등이 홍보관을 무대로 주로 홍보업무를 담당할 예정이며 박람회 기간중에는 대회장을 누비며 행사장 안내를 맡을 계획. 또 관람객들이 원하면 기념촬영도 같이 할 수 있게끔 설계돼 있다. 내년 8월 박람회가 시작되면 각지에서 흩어져 활동하던 7~10대의 꿈돌이로봇이 모여 관람객들과 호흡을 같이 할 예정. 로봇의 작동원리는 지금과 같이 운영요원에 의한 원격조종법과 직접 로봇에 시각센서를 붙여 스스로 알아서 움직이게 하는 방법이 고려되고 있으나 아무래도 손쉬운 원격조종법이 채택될 가능성이 큰 것으로 알려졌다.
꿈돌이로봇의 크기는 두종류. 기공식 때 선보인 비행접시의 지름이 2.7m, 무게 4백kg, 높이 2m짜리 대형이 있고 현재 홍보관에서 열심히 일하고 있는 소형(비행접시 지름 1.5m, 무게2백kg, 높이1.7m)이 있다. 두종류 모두 기능은 똑같다.

첨단기술의 총합, 조각로봇
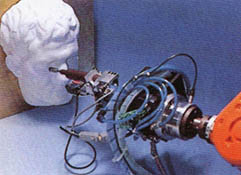
꿈돌이로봇이 행사장을 누비며 관람객들의 귀여움을 독차지하고 있을 때 정부관 한 모퉁이에서는 관람객들의 실제 모습을 조각해주는 '로봇조각가'가 인기를 끌 것으로 예상된다. 한 어여쁜 여성이 원형 캡슐속에 들어가 잠시 앉아 있으면 특수카메라는 딱 한장의 사진을 찍는다. 이 한장의 사진으로 컴퓨터는 조각 대상품의 3차원 데이터를 읽어 들이는 것이다. 이 데이터는 곧바로 컴퓨터그래픽시스템으로 넘어가 3차원 입체영상을 구성한다. 영상속에서는 움직이는 모습이 다양하게 표현된다.
앞모습 옆모습 뒷모습은 물론이고 웃는 얼굴에서 우는 얼굴로 변해가는 과정을 연속동작으로 나타내준다. 한 표정만을 찍고 이처럼 여러 모습을 보여주는 것은 컴퓨터그래픽프로그램으로 가능하다. 측정 데이터는 그래픽시스템과는 별도로 바로 조각로봇에 넘겨진다.
로봇은 20분만에 조각을 완료, 꿈돌이 모습을 한 자율이동로봇에게 넘겨주며 꿈돌이는 조각의 실제 인물에게 조각품을 전달해 준다. 조각로봇은 두대가 활약할 예정이므로 10분만에 하나씩 완성되는 셈. 자기 모습이 완성되는 동안 관람객은 컴퓨터그래픽의 연출솜씨를 감상하기도 하며 중간에 양념으로 설치된 '그림 그리는 로봇'이 붓으로 표현해 주는 자기 모습이 실제 모습과 얼마나 닮았는지 평가할 수 있다.
"조각로봇으로 형상화시켰지만 전체시스템은 최근 각광받고 있는 컴퓨터통합생산시스템(CIM)을 구현한 것입니다. 자동화된 공장의 모습을 '조각하는 로봇'으로 주제를 설정해 표현했다고나 할까요. 데이터의 측정에서부터 컴퓨터그래픽, 자동공작기계(조각로봇), 물류이동시스템(자율이동로봇)과 이들 부분을 통합관리하는 소프트웨어는 생산현장에서 응용할 수 있는 첨단과학기술입니다." 조각로봇의 총괄 책임을 맡고 있는 한국과학기술연구원(KIST) 김문상박사의 설명이다.
김박사의 말대로 조각로봇시스템은 현재 대학이나 연구소에서 연구가 진행되고 있는 각부분의 최첨단 기술을 하나로 묶어논 것이다. 이를 좀더 자세히 살펴보기로 하자.
우선 측정분야다. 측정에는 세대의 카메라가 동원된다. 방법은 촬영대상물에 격자무늬를 때려 이로 발생하는 빛의 간섭을 통해 3차원 영상데이터를 읽어들인다. 이를 보통 모아레기법이라고 하는데, 사람의 등뼈가 휘어졌는지를 파악하는 등 의학분야에서 사용되고 있다. 특히 최근에는 컴퓨터과학의 발전으로 모아레기법의 활용이 늘고 있는데 금형의 자유곡면을 측정하는 방법 등 공학분야에도 널리 응용되고 있다. 이번 조각로봇의 측정시스템은 한국과학기술원(KAIST) 정밀기계공학과 김승우 교수가 책임을 맡았다.
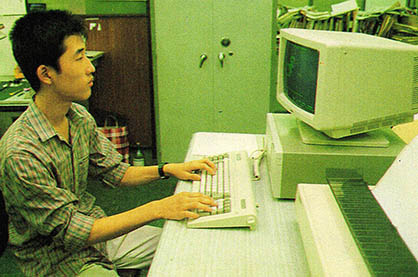
다음은 컴퓨터그래픽. 3차원의 데이터를 읽어들였다 하더라도 이를 입체영상으로 재구성하는 것은 생각만큼 쉽지 않다. 눈 코 입과 헤어스타일을 복원하는 일과 한표정만의 데이터를 가지고 울고 웃는 변화를 주기 위해서는 인공지능의 한분야라고 할 수 있는 전문가시스템 소프트웨어가 동원돼야 한다. 기존기술로 2차원 표현까지는 가능했으나 3차원 그래픽은 처음 시도하는 일. 물론 기존의 CF처럼 한사람의 데이터가 입력돼 프로그램된 상품화된 패키지는 얼마든지 있을 수 있으나 이번 시스템처럼 매번 사람의 데이터가 바뀌는, 거의 리얼타임과 같은 움직이는 3차원 입체그래픽은 새로운 시도라고 개발팀은 설명한다.
조각하는 로봇은 일종의 공작기계를 로봇으로 대체한 것. 공작기계에 유연성을 대폭 부여했다고 생각하면 된다. 스스로 툴(도구)을 교체해가면서 빠른 시간에 정확하게 사람의 얼굴 모습을 조각한다는 것은 쉬운 기술은 아니다. 더군다나 조각대상의 데이터가 프로그램 내에 포함돼 있는 항상 불편의 것이 아니라 수시로 변하는 데이터이기 때문에 더욱 쉽지 않다. 공장에서 대량생산하는 기계부품이라면 고정된 프로그램에 따라 자동공작기계가 깎아나가면 되지만 매번 깎아야 할 데이터가 바뀐다면 기존의 자동공작기계로는 불가능하다고 할 수 있다.
다음은 완성된 조각품을 운반하는 이동시스템. 처음에는 컨베이어벨트로 구상했으나 너무 무미건조할 것 같아 자율이동로봇이 직접 완성품을 들고 전달하는 방식을 취했다. 이를 보통 생산현장에서는 자동물류시스템(AGV, Automatic Guided Vehicle)이라고 부른다. 기존의 컨베이어벨트가 대량생산에 맞는 물류시스템이라면 AGV는 다품종 소량생산에 걸맞는 물류시스템. 일반 관람객들에게 호기심을 만족시키기 위해 로봇을 등장시켰으나 이는 실제 산업현장에서 자동생산시스템이 변화하는 과정을 반영하는 것이라고 말할 수 있다.
박람회를 찾는 일반 관람객들의 눈에는 잘 띄지 않지만 가장 중요한 기술적 개념은 측정과 컴퓨터그래픽 그리고 조각로봇과 자율이동로봇을 통제하는 CIM프로그램이다. 이들 사이에 이동하는 데이터를 적절하게 조종하고 일관되게 작업을 통제하는 소프트웨어야말로 공장자동화의 최고봉이라고 할 수 있다. 김문상 박사는 "이번 이벤트의 가장 큰 의미는 각 생산 부문을 하나로 묶는 CIM에 있다. 물론 개별 기술의 실현도 매우 중요하지만 이를 통합적으로 운영해본다는데 큰 의미를 갖는다"고 말했다.
이외에도 '양념'이라고 표현은 하지만 붓을 들고 3차원 데이터를 2차원 화폭에 그려내는 '드로잉로봇'도 인기면에서 만만치 않을 것으로 예상된다. 로봇 선진국인 일본에서 개최된 행사에서는 간혹 등장하기는 했지만 우리나라에서는 처음으로 선보인다.
2세대로 도약을 준비
우리나라의 산업현장에는 약 2천대의 산업용 로봇이 활약하고 있다. 78년 현대자동차에서 일본의 도요타 공작기계로부터 용접로봇을 들여온 이래 80년대 중반에는 전자와 자동차 산업을 중심으로 대량의 산업용로봇이 현장에 배치됐다. 초기에는 용접이나 운반 등 단순작업에 주로 쓰였으나 로봇의 기능이 발달함에 따라 조립이나 도장 등에도 활용되기 시작했다. 이를 통틀어 1세대 산업용 로봇이라고 부른다.
우리나라의 산업용 로봇 제작기술은 어느 수준인가. 1983년 대우중공업에서 프로세스로봇을 개발하기도 했으나 국내 산업현장에서 활약하고 있는 로봇은 대부분 외국산이다. 몸체는 국내에서 제작하기도 했으나 핵심부품인 컨트롤러는 수입품에 의존했다. 껍데기만 국산이고 알맹이는 외제였던 것이다. 그러던 것이 90년대로 접어들면서 상황이 조금씩 변하기 시작했다. 로봇 수요가 많아지면서 로봇을 생산하는 국내업체들이 30여개로 늘어났고 컨트롤러 등 로봇의 핵심부품도 국내 생산이 가능하게 됐다.
더욱이 로봇의 원천기술을 연구하는 연구기관들이 대폭 증가했다. KIST나 기계연구소 등 일부 연구소에 국한됐던 로봇연구가 대학부설 연구소(서울대 자동화시스템연구소, 포항공대 산업과학기술연구소 등)와 민간기업연구소로 확산돼 많은 기술축적이 이루어졌다. 특히 이들 연구소에서는 단순한 산업용로봇 연구에서 벗어나 제2세대로 비약을 모색하기 시작했다.
2세대의 특징은 로봇이 처음부터 끝까지 주어진 작업만 하는 것이 아니라 상황을 스스로 판단해 융통성 있게 대응하는 것. 예를 들면 로봇에 눈(시각센서)를 붙여 조립의 정확도를 높인다든가, 장애물을 피해다니면서 물건을 운반하는 로봇 등을 만들기 시작한 것이다. KIST 박종오박사 팀의 금형연마로봇, 포항공대 산업과학기술연구소의 7축직접구동로봇, KAIST 변증남교수팀의 다각보행(발 달린)로봇, 에너지연구소가 고안중인 원자력발전설비수리용 로봇 등이 바로 그것이다.
이번 조각로봇의 개발을 책임지고 있는 김문상박사 팀도 생산이 완료된 자동차의 품질을 측정할 수 있는 센서를 갖춘 로봇을 개발, 국내 자동차 생산공정에 투입해 큰 성과를 올린 바 있다. 조각로봇도 바로 이처럼 로봇에게 어느 정도의 지능을 부여하고자 하는 로봇개발의 흐름과 밀접한 관련을 가지고 있다고 할 수 있다. 특히 부문별로 연구개발이 진행되고 있는 것을 하나로 묶는 CIM시스템은 완벽한 공장자동화 연구에 기여하는 바가 클 것으로 기대된다.
신명나는 율동, 사물놀이로봇
'하늘과 땅의 소리를 모아' 우리의 전통가락과 첨단과학기술을 조화시킨 신나는 놀이마당이 93대전EXPO 한밭벌에서 펼쳐진다. 하늘을 의미하는 쇠(꽹과리와 징)와 땅을 의미하는 가죽(북과 장고)이 펼쳐내는 우리의 가락을 첨단과학기술의 상징인 로봇에게 연주시킨다는 발상은 매우 신선한 것으로 받아들여지고 있다.
로봇은 어느 정도의 사물연주가 가능할까. 아직까지 이에 대한 대답은 명확하게 내릴 수 없다. 현재까지 분명한 점은 치는 행위(타악)는 로봇이 충분히 흉내 낼 수 있으며 로봇의 기능에 맞춰 특별히 자곡을 한다면 사람이 하는 것과는 비교할 수 없지만 그런대로 사물연주가 가능할 것으로 예상된다. 사물놀이로봇은 삼성전자가 돈을 대고 한국기계연구소 등의 자문을 받아 한국미연이 제작해 정부관에 전시할 예정이다.
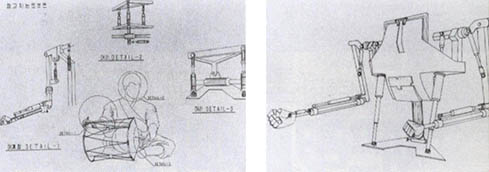
로봇의 크기는 사람의 크기와 같이 제작될 것이며 로봇이 연주할 곡은 중앙대 박범훈 교수가 로봇의 기능을 고려해가며 작곡 중이다. 사물연주로봇제작에 있어서 기술적 난제는 얼마나 빨리 악기를 칠 수 있느냐는 점. 즉 굴림과 같은 빠른 타악연주를 로봇이 해낼 수 있느냐는 것이다. 현재까지는 1초에 3회까지는 가능한 것으로 알려져 있다. 특히 장고와 같이 오른손이 왼쪽으로 넘어가야 하는 동작 등도 고려해야 하므로 제작에 어려움을 겪고 있다. 다음으로 어려운 점은 네대의 로봇을 하나의 음악으로 통합해 운영하는 콘트롤프로그램. 현재 국내기술진과 외국자문단이 협력해가며 하나씩 문제를 해결해가고 있다고 한국미연측은 밝혔다.
사물연주로봇의 총책임을 맡고 있는 한국미연의 최진박 소장은 "아무래도 로봇만 가지고는 사물연주의 원소리를 재현할 수 없으므로 로봇의 연주와 진짜 사물연주를 결합시키는 것도 고려중이다"고 밝혔다. 또 박람회장에는 우리나라 사람만 있는 것이 아니라 외국인도 많을 것이므로 레이저와 컴퓨터그래픽을 동원, 사물의 소리 이미지를 영상화 시켜 보여줄 계획도 수립해놓고 있다. 아무래도 외국인들은 사물이 내는 소리에 익숙치 못하므로 꽹과리의 고저 강약을 영상화시켜 보조시스템으로 활용한다면 사물에 대한 이해의 폭이 훨씬 넓어질 것이다.
홍보와 안내를 맡은 꿈돌이로봇, 관람객들의 얼굴모습을 조각해주는 로봇, 우리의 흥겨운 가락을 신명나게 표현해주는 사물연주로봇 등은 대전EXPO의 명물로서 관람객들의 인기를 독차지할 것임에 틀림없다. 이들 로봇을 개발하는 측에서는 박람회만을 생각할 것이 아니라 이를 계기로 국내 로봇의 연구개발에 어떻게 기여할 수 있는 가를 염두에 두고 개발에 임해야 할 것이다.